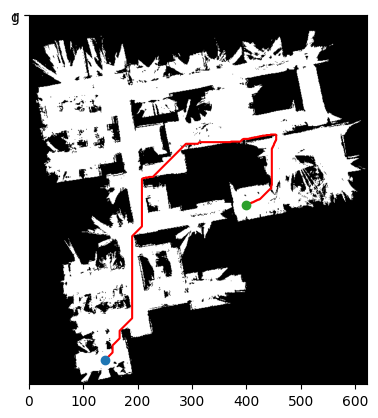
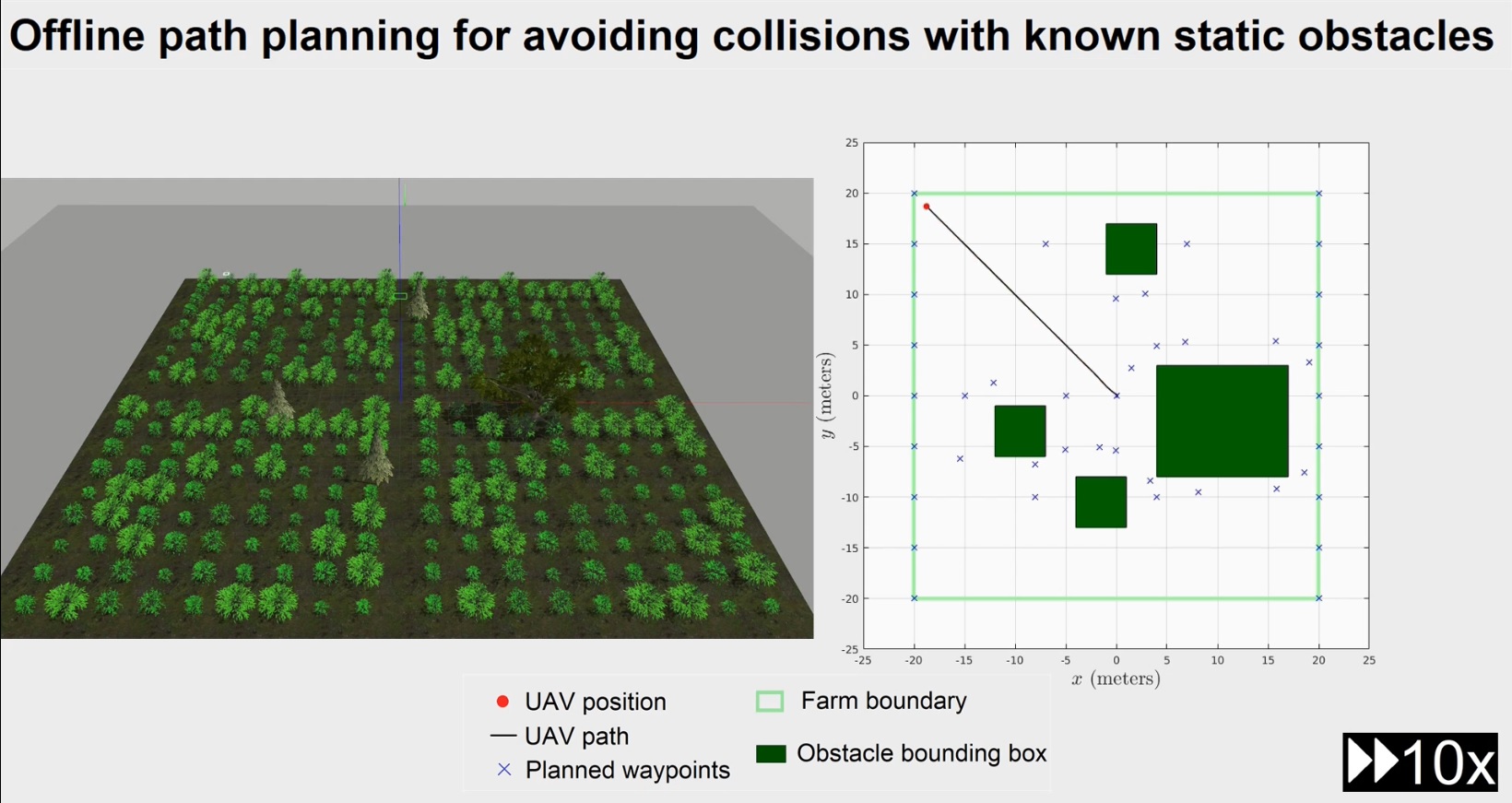
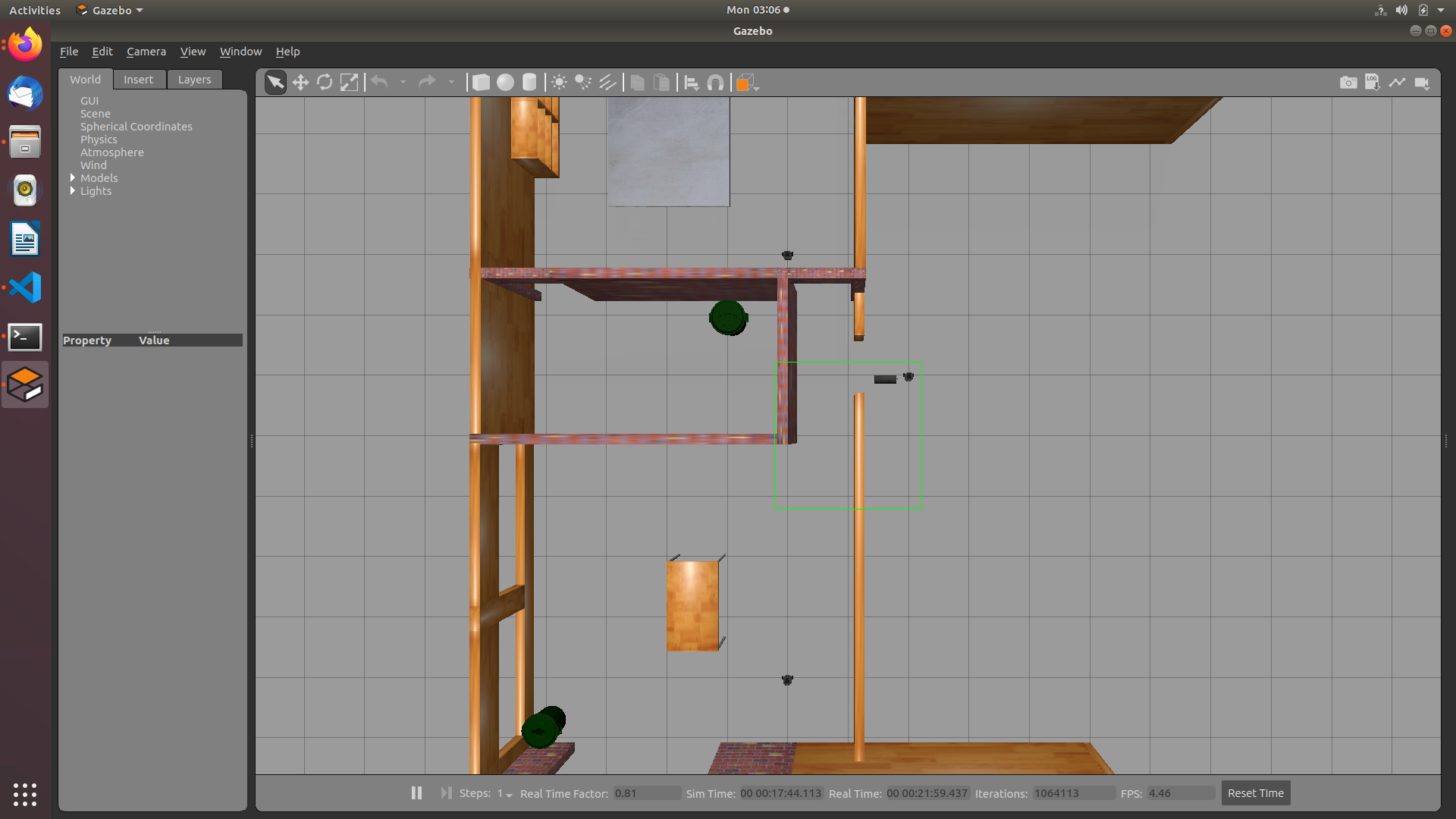
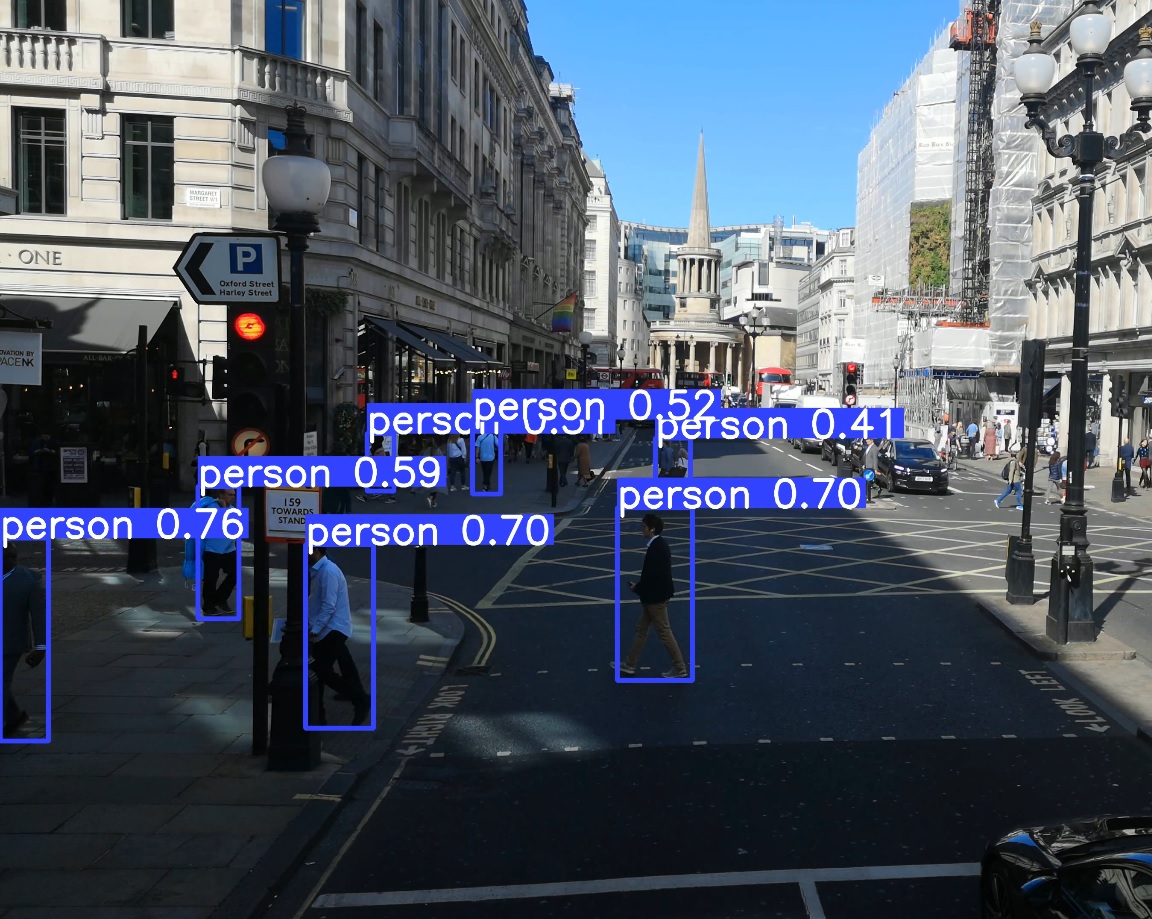
Localization of Multiple Mobile Robots using Aruco Markers Visual SLAM using ORBSLAM3 and Dead Reckoning Path Planning using A* and PRM UAV PX4 Autopilot, Gazebo and ROS Multirobot navigation in ROS and Gazebo Pedestrian Detection